一、方案概述
該技術在研究國外爬行機器人結構及使用基礎上,進行改進和創新,一方面大幅提升公司對柔性制孔機器人的使用和擴展應用能力,增強日常維護和快速排故維修能力;另一方面可實現柔性爬行制孔機器人的國產化,并有望形成一款原型產品。
二、方案內容和目的
本課題研制的成果主要用于飛機大部件自動裝配中的柔性制孔機器人的使用上,通過其核心技術的應用和推廣,可以達到以下目的:
1.深入研究前機身、中后機身柔性制孔機器人的機構和控制原理,提升柔性制孔機器人的使用和擴展應用能力,增強日常維護能力;
2.提高飛機裝配技術的自動化、柔性化水平;
3.優化飛機裝配主要依賴手工、質量穩定性差、成本高、效率低的現狀,提高機身裝配質量,減少飛機裝配工裝、降低飛機的制造和裝配成本,縮短生產準備周期、提高裝配效率。
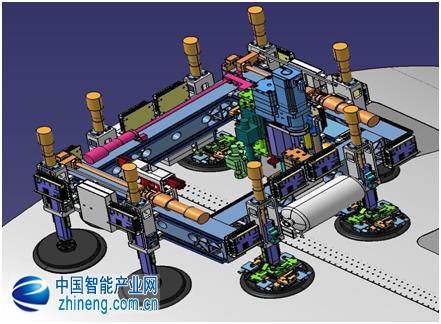
三、功能介紹
其主要功能指標如下:
能夠適應多種工作,用于多個項目;
1. 無需特別工裝,最小化對型架的影響和改動;
2. 實現在產品表面上自行走功能;
3. 利用傳感器讀取飛機工件所獲取的信息,修正理論位置;
4. 具有翻越50mm高障礙物或臺階的能力且3600自由動作。
四、主要創新點
項目中的柔性制孔機器人是一種自動化裝配的輕量化解決方案,符合柔性化和模塊化的發展方向,實現了以下幾方面的創新:
1. 提出制孔與鉚接一體化的末端執行器,針對產品裝配特點,合理分配各多功能末端執行器的集成度,實現鉆孔、鉚接、檢測、壓力腳、真空吸削等工藝任務;
2. 智能檢測裝置與多功能末端執行器的結構集成設計,可實現鉆鉚過程實時檢測;
3. 提出了數模、工藝與控制信息集成化的離線編程實現方法;通過將飛機產品的幾何數模與工藝規劃之間建立關聯,在制孔孔位信息中補充對應的工藝信息,并通過工藝信息與控制系統的聯系,最終實現在離線編程階段產品數模、工藝規劃與控制信息的集成;
4. 提出了基于爬行鉆鉚設備姿態調整的法向找正方法,并建立了法向找正模型;
5. 提出基于激光掃描的基準檢測方法,建立理論數模與實際數模之間的關聯,為實際鉆鉚現場的數據配準提供依據;
6. 提出全軟件型結構的開放式數控系統。建立在實時操作系統和標準數字伺服驅動器接口基礎上,全部由軟件實現數控系統功能。
- 天融信李雪瑩在“強網論壇”主論壇作報告 談AI賦能打造新時代網絡安全能力
- 神州數碼攜神州問學入選IDC-國內生成式AI市場主要廠商及早期進入者
- 數據領航,神州數碼助力青山工業數智變革
- 高通中國區董事長孟樸:5G與AI的融合正加速企業數字化轉型步伐
- 進博會“全勤生”高通七赴進博之約,展現智能計算與生態合作新篇章
- 神州鯤泰助力數字龍江智算中心跑出行業智能化加速度
- AI賦能新一代工業軟件,第四屆工業軟件創新應用大賽點亮東莞創新發展活力
- 收購軍工“硬科技”資產:展鵬科技搶占高壁壘“航空仿真賽道”
- KunTai M300-P01開發板首秀,神州鯤泰攜手英碼科技以智算助飛產業變革
- 攜手UALink,阿里云磐久AI Infra 2.0服務器亮相2024 OCP全球峰會