司南RTK定位在大型船舶靠泊的應(yīng)用
chuanbo
上海司南衛(wèi)星導(dǎo)航技術(shù)股份有限公司
隨著世界航運經(jīng)濟的不斷推進,船舶逐漸向快速化、大型化發(fā)展。目前,世界上最大的船舶已達到五、六十萬載重噸,尤其是超大型油輪、散貨船和大型集裝箱船的出現(xiàn),使安全靠泊成為引航員和船長迫切關(guān)心的問題。由于獲取船舶實時運動參數(shù)的延遲、錯誤導(dǎo)致船舶操縱失誤,從而造成船舶碰撞碼頭的事情常有發(fā)生。
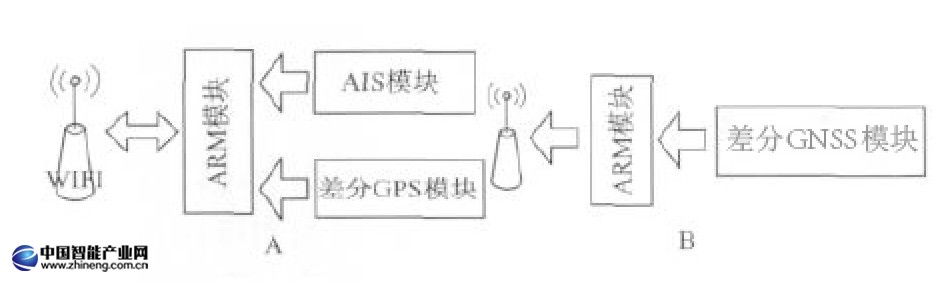
司南導(dǎo)航通過M300 GNSS接收機,組建以GNSS組合定位技術(shù)的大型船舶靠泊數(shù)學(xué)模型。在此模型基礎(chǔ)之上,建立船基平面坐標(biāo)系,通過此坐標(biāo)系計算船舶靠泊時船首、船尾相對碼頭的距離與速度、船首向與船舶轉(zhuǎn)向率等船舶動態(tài)參數(shù)。最后,采用G N S S差分定位組合技術(shù)、A I S技術(shù)和W I F I技術(shù)等設(shè)計大型船舶靠泊系統(tǒng)(包括硬件和軟件),實現(xiàn)大型船舶靠泊儀的可行性和有效性。
推薦廠商
廠商動態(tài)
- 加速行業(yè)“新智”生產(chǎn)力,至強W新品為專業(yè)AI應(yīng)用帶來多核高能
- 小度聯(lián)合新華網(wǎng)客戶端,舉辦“AI技術(shù)對中小學(xué)教育的深度賦能”主題活動
- 攜手天士力,神州數(shù)碼AI賦能醫(yī)藥行業(yè)數(shù)字化轉(zhuǎn)型
- 共繪數(shù)字經(jīng)濟未來,神州數(shù)碼登陸全球數(shù)字經(jīng)濟大會
- 神州數(shù)碼亮相2024世界人工智能大會,以生成式AI和智能算力共繪智能未來
- 超圖攜手鯤鵬、昇騰共筑地理空間AI技術(shù)底座,共建原生開發(fā)繁榮生態(tài)
- Moka Ascend 2024|勢在·人為,技術(shù)創(chuàng)新,激發(fā)企業(yè)管理內(nèi)在效能
- 東方通出席2023(第四屆)數(shù)字化轉(zhuǎn)型推動高質(zhì)量發(fā)展大會
- AIGC賦能醫(yī)療創(chuàng)新引領(lǐng)者榜單發(fā)布,神州數(shù)碼躋身TOP20
- 致遠互聯(lián)受邀參加“第四屆元宇宙與人工智能生態(tài)大會”