一、GNSS駕考/駕培系統(tǒng)背景
近年來,為提高駕照考試質(zhì)量,確保公平、公正,國家公安部發(fā)布了第91號令、第111號令、第123號令以及其它相關(guān)技術(shù)規(guī)范,對駕考系統(tǒng)和標(biāo)準(zhǔn)進(jìn)提出了改進(jìn)要求。按照“簡單實用,準(zhǔn)確可靠”的原則,很多駕考系統(tǒng)集成商基于GNSS產(chǎn)品開發(fā)了科目二、科目三等智能考試系統(tǒng),定位精度可達(dá)1cm,在實現(xiàn)精準(zhǔn)評判的同時,這套系統(tǒng)也幾乎將場地內(nèi)的各種地埋傳感器完全取代,大大降低了后期的場地維護(hù)難度和費用,提高了考試或訓(xùn)練場地的建設(shè)效率。另外,這套智能考試系統(tǒng)的推廣應(yīng)用將實現(xiàn)機動車駕駛?cè)丝荚嚬ぷ饔扇斯げ僮飨蛴嬎銠C管理的轉(zhuǎn)變,提高了了考試工作的透明度,減少了人為因素,體現(xiàn)了公開、公正、公平的原則。
隨著GNSS駕考系統(tǒng)的推廣應(yīng)用,駕校培訓(xùn)系統(tǒng)也必須隨之升級,以適應(yīng)駕考需要,事實上,相比較而言,駕培系統(tǒng)的應(yīng)用更為廣泛,市場更大,因此,推出智能駕培系統(tǒng)具有廣泛的社會效益和經(jīng)濟效益。
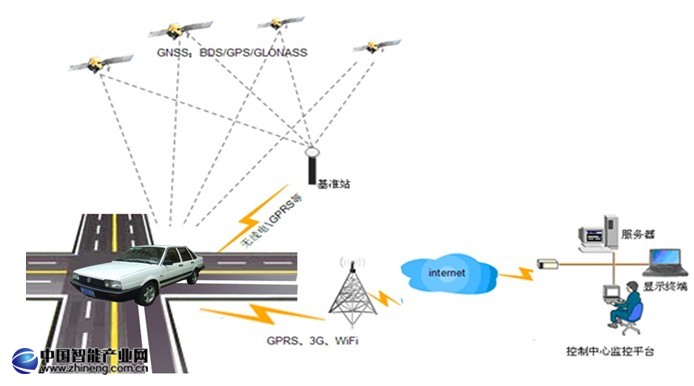
全球衛(wèi)星定位系統(tǒng)可以實現(xiàn)實時高精度定位,其實時定位精度可達(dá)±1cm,實時數(shù)據(jù)輸出頻率最大可達(dá)20Hz,是目前大范圍高精度實時定位的理想選擇。GNSS定位系統(tǒng)由GNSS基準(zhǔn)站、GNSS移動站、無線數(shù)傳電臺組成,系統(tǒng)具有如下幾個優(yōu)點:
1、全天候作業(yè):不受雨雪、大霧天氣及光照條件等因素的影響,可實現(xiàn)全天24小時作業(yè);
2、車載移動站和基準(zhǔn)站之間無須通視,大大增加了系統(tǒng)應(yīng)用的靈活性;
3、車載GNSS設(shè)備和基準(zhǔn)站使用無線數(shù)傳電臺通訊,覆蓋范圍可達(dá)半徑10公里以上,數(shù)據(jù)傳輸穩(wěn)定可靠且保密性好;
4、定位精度及實時性高,定位精度在±1cm,RTK定位輸出頻率可達(dá)10Hz,原始數(shù)據(jù)可以達(dá)到20Hz。
二、方案介紹
整個駕考/駕培系統(tǒng)大體上包括兩大部分:硬件部分和軟件部分,硬件部分包括GNSS設(shè)備、攝像頭、無線網(wǎng)橋等各種車載傳感器和信號傳輸設(shè)備,負(fù)責(zé)收集各種數(shù)據(jù)并傳輸,軟件部分負(fù)責(zé)處理包括GNSS數(shù)據(jù)在內(nèi)的各種傳感信息,并分析計算,最終報出評判結(jié)果。
GNSS設(shè)備可以選擇市場上已集成的RTK產(chǎn)品(整機),也可以采用GNSS板卡,兩種類型的區(qū)別在于:
RTK整機產(chǎn)品:
a)已經(jīng)做好集成,可直接應(yīng)用,縮短了開發(fā)周期
b)體積已經(jīng)定型,無法任意修改,不方便進(jìn)一步集成
c)成本相對較高
GNSS板卡:
a)需要自行設(shè)計底板進(jìn)行集成,開發(fā)周期相對較長
b)板卡體積較小,便于與其他設(shè)備統(tǒng)一集成
c)成本較低
2.1 科目三GNSS應(yīng)用方案介紹
科目三、科目二GNSS應(yīng)用方案中,都包括基準(zhǔn)站系統(tǒng)和車載移動站系統(tǒng)兩大部分,其中基準(zhǔn)站系統(tǒng)是一樣的,差別在于車載移動站系統(tǒng),對于科目三來說,一般采用單天線GNSS設(shè)備來實現(xiàn)精確定位,而對于科目二來說,一般采用雙天線GNSS設(shè)備同時實現(xiàn)精確定位和精確定向。
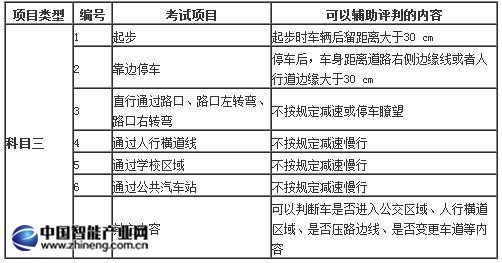
科目三GNSS應(yīng)用系統(tǒng)可以評判的內(nèi)容如下表:
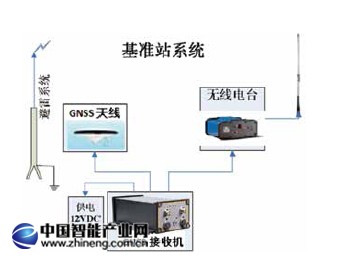
2.1.1 GNSS基準(zhǔn)站系統(tǒng)建設(shè)
基準(zhǔn)站包括GNSS接收機、GNSS天線、無線數(shù)傳電臺、供電設(shè)備、避雷設(shè)備等。
GNSS差分基準(zhǔn)站是整個定位系統(tǒng)的基準(zhǔn)框架,長期連續(xù)跟蹤觀測衛(wèi)星信號,通過數(shù)據(jù)無線數(shù)傳電臺實時傳輸播發(fā)基準(zhǔn)站差分改正信息,并實時為各車載移動站提供高精度的載波相位差分?jǐn)?shù)據(jù)及起算坐標(biāo)。
由于差分信息的播發(fā)的連續(xù)性和可靠性直接關(guān)系到全場的所有車載GNSS設(shè)備的GNSS精度,它提供的差分改正數(shù)是場內(nèi)所有車輛定位精度達(dá)到厘米級的基礎(chǔ),在基準(zhǔn)站位置選擇時應(yīng)做多方面綜合考慮。參考站要求建立在地基穩(wěn)定的地點,同時GNSS基準(zhǔn)站場地應(yīng)滿足以下要求:
a)基站的位置一般選擇高處、空曠的位置,距易產(chǎn)生多路徑效應(yīng)的地物(如高大建筑、樹木、水體、海灘和易積水地帶等)的距離不小于200m
b)保證地平線15度以上沒有遮擋,建議建設(shè)在考試場地范圍內(nèi)的最高處
c)距電磁干擾區(qū)(如微波站、無線電發(fā)射臺、高壓線穿越地帶等)的距離不小于200m
d)避開易產(chǎn)生振動的地帶
e)須保證供電的穩(wěn)定性,對于電子設(shè)備來說,電源不穩(wěn)定顯然會降低其使用壽命甚至可能造成損壞,建議采用UPS設(shè)備進(jìn)行電源保護(hù),防止電源突然中斷、電壓下陷和電壓浪涌
2.1.2 GNSS車載移動站系統(tǒng)
GNSS車載移動站由GNSS接收機、GNSS 天線、無線電接收天線組成。
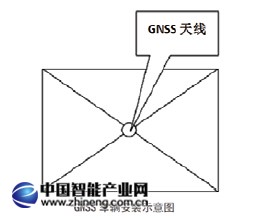
在實際應(yīng)用時可以將車載移動站GNSS天線固定在車輛頂部,將GNSS接收機主機放在車輛內(nèi)部,通過數(shù)據(jù)線和車載電腦連接,GNSS和電腦的通訊方式可以為RS232或RJ45 。

根據(jù)GNSS數(shù)據(jù)進(jìn)行高精度評判可以通過兩種方式實現(xiàn):
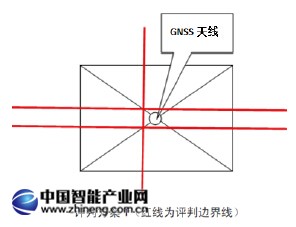
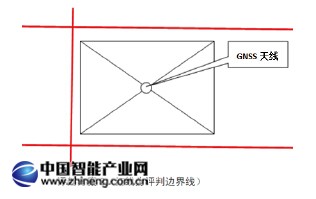
1)在考試路段電子地圖上設(shè)置GNSS天線所在位置的評判邊界線,如果車載GNSS移動站輸出的位置越界即判為不合格。
2)通過GNSS天線安裝的具體位置及距前后左右的距離,可以反算車輛邊緣(或輪胎)的精確位置,在考試路段電子地圖上設(shè)置車輛邊界或輪胎位置的評判邊界線,用于考試項目的評判,車輛邊緣位置越界即判為不合格。
2.1.3 司南GNSS車載移動站接收機輸出數(shù)據(jù)格式
車載GNSS移動站通過RS-232 或RJ45輸出的數(shù)據(jù)包括用于自動評判的三維位置、方向、速度信息等,可以很方便的利用這些信息進(jìn)行評判,主要信息包括:
· 考試車輛當(dāng)前位置的大地坐標(biāo)(經(jīng)度L、維度B、高度H);
· 考試車輛當(dāng)前位置的的平面坐標(biāo)(北向坐標(biāo)x,東向坐標(biāo)y,海拔高度h);
· GNSS定位狀態(tài)標(biāo)記(判斷定位精度);
· 考試車輛運動速度(判斷車輛行駛速度);
· 考試車輛運動方位角(判斷車輛方向,方向值不變即為直線行駛)。
2.1.4 GNSS產(chǎn)品推薦
2.1.4.1 司南GNSS板卡
(一)K500板卡
K500 GNSS主板是司南導(dǎo)航公司完全自主研發(fā)的全球首款北斗衛(wèi)星導(dǎo)航系統(tǒng)B1+ GPS L1+ GLonASS L1 三系統(tǒng)單頻OEM板卡。K500擁有優(yōu)越的動態(tài)捕獲性能及高精度載波相位解算,填補國內(nèi)外三系統(tǒng)單頻系統(tǒng)高動態(tài)、高精度單頻OEM板卡的市場空白。
K500的硬件尺寸、接口、數(shù)據(jù)指令與進(jìn)口主板兼容。
K500可廣泛應(yīng)用于GIS采集器、航空航天、機械控制、系統(tǒng)集成、勘探、精準(zhǔn)農(nóng)業(yè)、交通、海洋、港口、氣象、國防、科研院所、大專院校等行業(yè)的高精度差分定位與授時。
由于是單頻定位,K500板卡成本較低,但通過RTD或者RTK等差分方式,其精度也可以達(dá)到亞米級甚至厘米級,特別適合于駕考培訓(xùn)系統(tǒng)。
特點:
· 采用北斗B1、GPS L1、GLonASS L1等三系統(tǒng)聯(lián)合定位或單系統(tǒng)定位,預(yù)留伽利略系統(tǒng);
· 支持SBAS、RTD偽距差分,同時支持單頻RTK;
· 支持外接頻標(biāo),支持PPS輸出;
· 兼容進(jìn)口板卡的物理尺寸、電氣接口以及指令報文,可完全替代進(jìn)口板卡;
· 可直接輸出PJK平面坐標(biāo),易于各種系統(tǒng)集成及機械控制等;
· 支持定制化服務(wù),可以滿足不同行業(yè)應(yīng)用的特殊需求;
· 100M內(nèi)存數(shù)據(jù)存儲,可自動記錄原始數(shù)據(jù);
· 高可靠的載波跟蹤技術(shù),大大提高了載波精度,為用戶提供高質(zhì)量的原始觀測數(shù)據(jù);
· 智能動態(tài)靈敏度定位技術(shù),適應(yīng)各種環(huán)境的變換,適應(yīng)更加惡劣、更遠(yuǎn)距離的定位環(huán)境;
· 全面的高精簡報文,易于數(shù)據(jù)傳輸及配套軟件的應(yīng)用開發(fā);
· 體積小、重量輕、功耗低;
· 獨一無二的性價比。
(二)K501板卡
K501 GNSS主板是司南導(dǎo)航完全自主研發(fā)的全球首款BD-2(北斗二代衛(wèi)星導(dǎo)航系統(tǒng))+GPS小尺寸主板,采用GPS+北斗雙系統(tǒng)四頻高動態(tài)解算引擎,定位可達(dá)厘米級定位精度。K501擁有優(yōu)越的動態(tài)捕獲性能及高精度載波相位解算,填補了BD-2高動態(tài)、高精度應(yīng)用市場的空白。
K501的硬件尺寸、接口、數(shù)據(jù)指令與進(jìn)口主板兼容,與國外某主板(如OEM615),在大小、厚度、定位孔、接插件接口等等完全一致而且在功耗上要優(yōu)于他們。
K501可廣泛應(yīng)用于高精度駕考定位、測繪(RTK或手持RTK)、變形監(jiān)測系統(tǒng)、機械控制、系統(tǒng)集成、勘探、精準(zhǔn)農(nóng)業(yè)、海洋、港口、氣象、國防、科研院所、大專院校等行業(yè)的高精度差分定位與授時。
特點:
· 支持BD-2 B1/B2,GPS L1/L2雙星四頻
· 優(yōu)于進(jìn)口板卡的雙星解算引擎,真正實現(xiàn)GPS+BD-2的雙星解算,適應(yīng)更加惡劣、更遠(yuǎn)距離的定位環(huán)境
· 支持GPS/BD-2單系統(tǒng)獨立定位和GPS+BD-2多系統(tǒng)聯(lián)合定位
· 兼容進(jìn)口板卡的物理尺寸、電氣接口結(jié)合短報文指令,可完全替代進(jìn)口板卡
· 快速RTK,適合于RTK或手持RTK
· 可直接輸出PJK平面坐標(biāo),易于各種系統(tǒng)集成及機械控制等,無線第三方進(jìn)行投影轉(zhuǎn)換開發(fā)
· 支持短、中、長基線RTK解算
· 支持定制化服務(wù),可以滿足不同行業(yè)應(yīng)用的特殊需求
· 200M內(nèi)存數(shù)據(jù)存儲,15秒采樣可存儲1個月數(shù)據(jù)
· 體積小、重量輕、功耗低
· 高數(shù)據(jù)更新率,RTK定位數(shù)據(jù)更新率1Hz\2Hz\5Hz\10Hz可調(diào)
· 獨一無二的性價比
2.1.4.2 司南M300C GNSS 接收機
司南M300C GNSS接收機采用自主研發(fā)的北斗二代+GPS雙星主板,濃縮國內(nèi)外GNSS行業(yè)的先進(jìn)技術(shù),抗干擾能力強、定位速度快、精度高的特點,是國內(nèi)高精度GNSS測量系統(tǒng)的典范。
M300C接收機主機功耗小于2.5W,由于功耗低產(chǎn)生熱量小,解決了密封性與散熱的矛盾,降低了接收機的損耗,保證接收機工作的穩(wěn)定性,延長了接收機使用壽命。數(shù)據(jù)傳輸接口采用Lemo頭連接,保證了數(shù)據(jù)通訊的穩(wěn)定性以及設(shè)備接駁的嚴(yán)密性。
M300C是工業(yè)級設(shè)計的專業(yè)接收機,堅固的外型結(jié)構(gòu)和通用的技術(shù)性能適合進(jìn)行長時間連續(xù)工作。M300C與AT300測量型天線設(shè)備配合使用,能夠最大限度地滿足駕考系統(tǒng)、機械控制、橋梁健康監(jiān)測、大壩變形監(jiān)測、地表沉降變形監(jiān)測等行業(yè)系統(tǒng)集成的需要。
2.1.5 M300C主要特點:
· 采用北斗與GPS雙星四頻GNSS模塊,可單北斗或單GPS定位,也可聯(lián)合RTK定位,可以在惡劣環(huán)境、山區(qū)、相對遮擋較嚴(yán)重的地方快速定位
· 高度靈活的分體式接收機、天線設(shè)計,適用于各種變形監(jiān)測、網(wǎng)絡(luò)參考站、駕考系統(tǒng)、機械控制等系統(tǒng)集成應(yīng)用
· 內(nèi)置2000伏光電隔離,對接收機有效進(jìn)行過流過壓保護(hù),預(yù)防雷擊
· 使用Autobase技術(shù),開機即可快速實現(xiàn)參考站的配置
· 450MHz超高頻無線電臺適用基準(zhǔn)站和流動站作業(yè),確保現(xiàn)場工作的電臺信號覆蓋范圍以及數(shù)據(jù)安全性,通訊協(xié)議支持透明傳輸、TT450S
· 預(yù)留支持以太網(wǎng)、GSM/GPRS通訊
· 支持GPS信號和L2C現(xiàn)代化改造后的GPS信號
· 時間同步支持1PPS實時輸出
· 支持PJK平面坐標(biāo)輸出,無需第三方軟件做投影轉(zhuǎn)換
· 支持自動差分,差分格式支持RTCM2.X、RTCM3.X以及CMR
· 兩個電源接口,兩個串口,滿足更多需求的使用
· 內(nèi)部儲存為100M,可設(shè)置自動記錄原始數(shù)據(jù)
· 可遠(yuǎn)程設(shè)置、下載、查看數(shù)據(jù)等等
2.2 科目二GNSS應(yīng)用方案介紹
對于駕校考試系統(tǒng)的科目二,要求測試整個車輛的位置(前后左右移動情況),如果使用GNSS衛(wèi)星定位系統(tǒng)至少需要兩臺設(shè)備,既要測出車的方位角度又要測出具體位置。
2.2.1 RTK成品推薦——M600姿態(tài)定位接收機
司南導(dǎo)航專為駕校系統(tǒng)研發(fā)設(shè)計出M600 GNSS姿態(tài)定位接收機,它采用中國的北斗二代衛(wèi)星定位系統(tǒng)和美國GPS雙星四頻GNSS板卡,可以實現(xiàn)在樹下、遮擋較嚴(yán)重和高動態(tài)情況下能實現(xiàn)快速高精度定位和測向。通過M600 GNSS姿態(tài)定位接收機,可以準(zhǔn)確無誤的判斷出車輛整體運動情況,誤差在厘米級定位精度。
主要特點
· 采用北斗與GPS雙核雙星四頻GNSS模塊,可單北斗或單GPS定位,也可聯(lián)合RTK定位
· 單套設(shè)備可實現(xiàn)高精度RTK定位坐標(biāo)、方位角和俯仰角或橫滾角測量
· 支持PJK平面坐標(biāo)輸出,無需第三方軟件做投影轉(zhuǎn)換
· 高動態(tài)數(shù)據(jù)輸出,數(shù)據(jù)更新率支持1Hz、2Hz、5Hz、10Hz
· 可根據(jù)客戶需求自定義數(shù)據(jù)輸出格式
· 450-470MHz超高頻無線電臺適用基準(zhǔn)站和流動站作業(yè),確保現(xiàn)場工作的電臺信號覆蓋范圍以及數(shù)據(jù)安全性,通訊協(xié)議支持透明傳輸、TT450S
· 內(nèi)置2000伏光電隔離,對接收機有效進(jìn)行過流過壓保護(hù),預(yù)防雷擊
· 內(nèi)置二極管電源保護(hù)功能,可防電源正負(fù)極接反
· 預(yù)留支持以太網(wǎng)、GSM/GPRS通訊
· 時間同步支持1PPS實時輸出
· 支持自動差分,差分格式支持RTCM2.X、RTCM3.X以及CMR
· 兩個電源接口,兩個串口,滿足更多需求的使用
· 內(nèi)部儲存為100M,可設(shè)置自動記錄原始數(shù)據(jù)
· 高度靈活的分體式接收機、天線設(shè)計,可以應(yīng)用于各種姿態(tài)測量系統(tǒng)
· 姿態(tài)測量功能精度優(yōu)越、性能穩(wěn)定、功能全面、易于操作,能提供靜態(tài)或動態(tài)平臺精確的實時航向、俯仰和橫滾姿態(tài)角,可以運用在多種運動載體上,如船舶、裝卸車輛、港口機械、飛機、雷達(dá)等,是海上、空中和地面等姿態(tài)測定應(yīng)用最理想的選擇
2.2.2 工作原理
M600 GNSS姿態(tài)定位接收機內(nèi)置兩塊GNSS板卡,其中一塊根據(jù)基準(zhǔn)站發(fā)過來的差分?jǐn)?shù)據(jù)進(jìn)行RTK定位并輸出定位坐標(biāo),此板卡同時把原始數(shù)據(jù)發(fā)給另一塊板卡,另一板卡根據(jù)兩個板卡的原始數(shù)據(jù)解算出兩個天線位置的方位角和俯仰角或者橫滾角,從而輸出角度信息。
測姿的原理也是通過差分來實現(xiàn),就是用兩臺接收機安置在基線的兩端并同步觀測相同的衛(wèi)星,以確定基線兩端在地球坐標(biāo)系中的相對位置或基線向量。它之所以能提高精度,就在于兩者的相關(guān)性,即通過差分技術(shù)來抵消公共誤差部分。
差分GNSS的原理如下圖原理所示。在已知位置上設(shè)置一個參考站,其由一個 GNSS差分接收機和一個差分發(fā)射機組成。參考接收機接收衛(wèi)星信號,監(jiān)測 GNSS系統(tǒng)的誤差,并按規(guī)定的時間間隔把修正信息發(fā)給另一個接收機,另一個接收機用修正信號校正自己的測量或位置解。
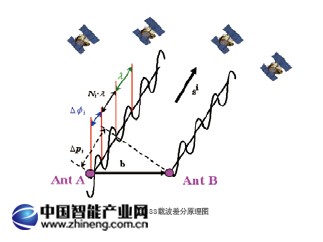
這是參考接收機是固定的情況,而實際應(yīng)用時更多是都在移動,在這種情況下,參考接收機的位置也是未知的,參考接收機發(fā)送給用戶的不是差分改正數(shù),而應(yīng)是全部的偽距或相位,用戶接收機得到的也不是改正后的精度更高位置,而是精度較高的相對位置角度。
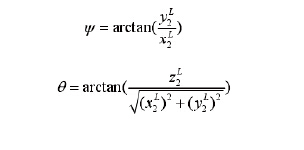
兩個GPS 天線組成一條基線可以確定載體的兩個姿態(tài)角,兩天線沿載體主軸方向配置,此時可以確定載體的偏航角和俯仰角。一般的,兩 GPS 天線在安裝好后,相對位置不發(fā)生變化,所以天線在載體坐標(biāo)系中的坐標(biāo)位置是確定的。
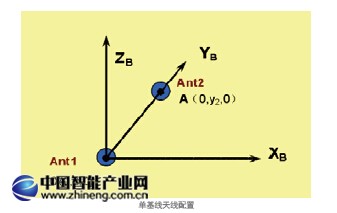
通過求解載波相位整周模糊度,兩天線在地心地固坐標(biāo)系中的相對位置可以精確的求得,根據(jù)地心地固坐標(biāo)系到當(dāng)?shù)厮阶鴺?biāo)系的轉(zhuǎn)換關(guān)系,即可將基線矢量轉(zhuǎn)換到當(dāng)?shù)厮阶鴺?biāo)系下,那么基線的兩維姿態(tài)角就可以確定了。
- 盛昊篷車:全面煥新品牌形象 助力中國篷車“進(jìn)化”革新
- 神州問學(xué)深入微調(diào)技術(shù)研究,小參數(shù)模型在特定任務(wù)場景中超越大模型
- 中建中新公司攜鍍鋅鋼管智能切割套絲系統(tǒng)亮相智能建造觀摩會
- 天融信李雪瑩在“強網(wǎng)論壇”主論壇作報告 談AI賦能打造新時代網(wǎng)絡(luò)安全能力
- 神州數(shù)碼攜神州問學(xué)入選IDC-國內(nèi)生成式AI市場主要廠商及早期進(jìn)入者
- 數(shù)據(jù)領(lǐng)航,神州數(shù)碼助力青山工業(yè)數(shù)智變革
- 高通中國區(qū)董事長孟樸:5G與AI的融合正加速企業(yè)數(shù)字化轉(zhuǎn)型步伐
- 進(jìn)博會“全勤生”高通七赴進(jìn)博之約,展現(xiàn)智能計算與生態(tài)合作新篇章
- 神州鯤泰助力數(shù)字龍江智算中心跑出行業(yè)智能化加速度
- AI賦能新一代工業(yè)軟件,第四屆工業(yè)軟件創(chuàng)新應(yīng)用大賽點亮東莞創(chuàng)新發(fā)展活力