一、系統(tǒng)設(shè)計(jì)意義
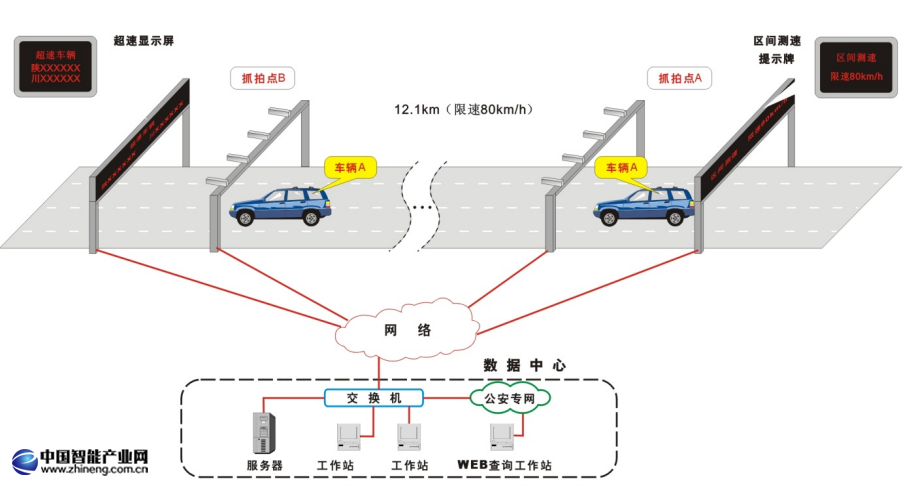
傳統(tǒng)超速抓拍系統(tǒng)采用的是單點(diǎn)測速方式,測量的是車輛的瞬時(shí)速度,容易引起爭議、容易躲避。區(qū)間測速是在高速公路、隧道、國省道無交叉路口的某一區(qū)間(一般為20公里左右)的兩端安裝自動抓拍卡口系統(tǒng),記錄車輛通過兩端的時(shí)間,利用“速度=距離/時(shí)間”公式,計(jì)算出車輛在該區(qū)間內(nèi)的平均車速。為達(dá)到滿意的效果,抓拍系統(tǒng)應(yīng)具有很高的車輛捕獲率和識別正確率。區(qū)間測速讓駕駛員難以回避,作為處罰超速違法行為的法律依據(jù)將更有說服力。
二、高遠(yuǎn)時(shí)代區(qū)間測速優(yōu)勢
1.監(jiān)控范圍大。區(qū)間測速系統(tǒng)由于對監(jiān)控路面進(jìn)行長距離監(jiān)控,對該區(qū)間內(nèi)行駛的機(jī)動車進(jìn)行全程監(jiān)控,擴(kuò)大了超速監(jiān)控的范圍,控制了區(qū)間內(nèi)整體的行車速度。
2.測速精度高。區(qū)間距離為兩個(gè)監(jiān)測斷面之間的距離,通過激光測量標(biāo)定,距離誤差幾乎為零;機(jī)動車行駛時(shí)間為經(jīng)過兩個(gè)監(jiān)測斷面的時(shí)間差,所有斷面點(diǎn)設(shè)備時(shí)間同步,并采用GPS時(shí)鐘校時(shí),時(shí)間誤差小。
3.“反監(jiān)控”能力強(qiáng)、監(jiān)控效果顯著。機(jī)動車駕駛員常利用電子狗等高科技設(shè)備提前發(fā)現(xiàn)電子警察并進(jìn)行逃避;在單點(diǎn)測速或監(jiān)控點(diǎn)周邊地段剎車減速,經(jīng)過監(jiān)控點(diǎn)后繼續(xù)超速行駛;這類具有反監(jiān)控能力的違法超速車,在區(qū)間測速系統(tǒng)監(jiān)控下將無所遁形。
4.說服力強(qiáng),更容易被理解和接受。區(qū)間測速系統(tǒng)測速原理簡單,精度高,監(jiān)控范圍為全區(qū)間,控制區(qū)間內(nèi)的平均車速,更容易被駕駛?cè)私邮堋?/p>
5.可拓展性更強(qiáng)。根據(jù)應(yīng)用的需要,區(qū)間測速系統(tǒng)可以擴(kuò)展更多的應(yīng)用功能,如:道路監(jiān)控功能、治安(交通)卡口功能、交通流采集功能、交通誘導(dǎo)功能(加誘導(dǎo)屏)等。
6.系統(tǒng)完全按照《GA/T832-2009道路交通安全違法行為圖像取證技術(shù)規(guī)范》的要求設(shè)計(jì),24h內(nèi)計(jì)時(shí)誤差不超過1.0s,并確保所有前端設(shè)備點(diǎn)位每日與電子卡口中心系統(tǒng)時(shí)鐘同步一次。
三、高遠(yuǎn)區(qū)間測速特點(diǎn)
?智能卡口、區(qū)間測速功能合二為一
本系統(tǒng)每一個(gè)前段設(shè)備車輛記錄系統(tǒng)就是一個(gè)單獨(dú)的(治安/測速)卡口記錄系統(tǒng),可以實(shí)現(xiàn)智能卡口記錄系統(tǒng)的所有功能。同一車道設(shè)置一個(gè)起始檢測卡口點(diǎn)位和一個(gè)結(jié)束檢測卡口點(diǎn)位就可以組成一個(gè)區(qū)間測速系統(tǒng)。對通過該車道的所有車輛進(jìn)行測速,而且這種測速可以有效的避免以往單點(diǎn)測試容易躲避的缺點(diǎn)。將卡口記錄系統(tǒng)和區(qū)間測速系統(tǒng)和二為一,在同樣的成本下可以實(shí)現(xiàn)更多的功能。
?采用全嵌入式結(jié)構(gòu)保障系統(tǒng)穩(wěn)定可靠
高遠(yuǎn)時(shí)代區(qū)間測速系統(tǒng)的設(shè)計(jì)充分利用在視頻圖像監(jiān)控領(lǐng)域的技術(shù)優(yōu)勢,主機(jī)硬件電路采用公司已在安防領(lǐng)域產(chǎn)品上應(yīng)用成熟的硬件平臺,并根據(jù)測速系統(tǒng)實(shí)際應(yīng)用需要,真對硬件電路進(jìn)行了改進(jìn)和優(yōu)化,在元器件選擇上全部采用工業(yè)級或軍工級芯片,降低了功耗,保證了系統(tǒng)在惡劣條件下長時(shí)間可靠運(yùn)行。抓拍主機(jī)采用LINUX操作系統(tǒng),并專門針對抓拍功能需要對代碼進(jìn)行了裁減和優(yōu)化,軟件功能較為“專一”,提升了CPU的工作效率和整機(jī)的工作穩(wěn)定性,系統(tǒng)采用軟硬件雙重看門狗技術(shù),絕對避免了系統(tǒng)死機(jī)。
?采用一體化設(shè)計(jì)、安裝使用及維護(hù)方便
前段車輛抓拍主機(jī)將抓拍攝像機(jī)、控制主板、存儲硬盤等設(shè)計(jì)為一體,使整個(gè)系統(tǒng)更加緊湊,安裝維護(hù)更加方便,無需配置工控機(jī)即可實(shí)現(xiàn)圖像自動記錄功能,極大的提高了系統(tǒng)的穩(wěn)定可靠性。
- 餐飲品牌加盟新探索:流浪泡泡推出風(fēng)險(xiǎn)兜底計(jì)劃
- 2025電力信息通信大會:邦彥云PC以信創(chuàng)賦能電力行業(yè)算力安全躍升
- 巨量引擎X火山引擎X抖音電商:推動AI技術(shù)與智能硬件深度融合,解鎖行業(yè)創(chuàng)新密碼
- 智能門鎖下半場:拼完功能拼售后,看奇兵到家如何破智能門鎖下半場
- GCC成果丨共建AI時(shí)代的數(shù)據(jù)智能基座,《向量數(shù)據(jù)庫白皮書》震撼發(fā)布!
- 用友YonSuite榮獲"全國中小企業(yè)協(xié)會推薦人工智能解決方案"大獎(jiǎng)
- 從“語言魔方”到“語音背包”,科大訊飛WAIC秀智能交互全場景實(shí)力
- 百度智能云AI基礎(chǔ)設(shè)施入選2025 WAIC重點(diǎn)創(chuàng)新成果 助力具身智能機(jī)器人多維能力建設(shè)
- “墨攻”智能化升級助力數(shù)字江漢邁入AI大模型時(shí)代
- 誰是AI電商實(shí)干家?2025電商AI創(chuàng)新實(shí)踐大賽啟動